Hoe kunnen we realtime congestie voorspellen?

Data worden steeds meer gemeengoed. Het aantal databronnen gebruikt voor verkeersmanagement neemt toe. In de wereld van verkeersmanagement zijn belangrijke bronnen onder andere Floating Car Data, data uit lussen in (snel)wegen en natuurlijk bij kruispunten. Floating Car Data geven een beeld van de gereden snelheden op een weg; data uit lussen over de hoeveelheid voertuigen die daar precies rijden of bijvoorbeeld bussen met hun actuele locatie en hun punctualiteit. Maar hoe krijgen we een compleet beeld van de actuele drukte en doorstroming - en liever nog: hoe kunnen we hiermee realtime congestie voorspellen?
Realtime Traffic Prediction
Intensiteiten worden niet overal bemeten. Door Floating Car Data en verkeersintensiteiten te combineren met verkeerstheorie, ontstaat een compleet beeld voor het voorspellen van files. Dit prognosticeren van de verkeerssituatie in het komende uur noemen we Realtime Traffic Prediction en vormt de basis van OmniTRANS Realtime,
Hoe werkt dat?
Maar hoe werkt dat Realtime Traffic Prediction nu precies? Om iets zinnigs te zeggen over een gebied, heb je eerst een definitie van dit gebied nodig. Een digitaal netwerk met daarin alle eigenschappen zoals wettelijke snelheid, kritische snelheid en kritische dichtheid is daarmee de eerste stap.
De volgende stap is het verbinden van verschillende real time databronnen met dit netwerk. Omdat er verschillende databronnen gebruikt worden (naast de hierboven genoemde snelheidsdata uit FCD en intensiteitsdata uit lussen op de weg ook parkeerdata uit parkeergarages) worden deze data eerst gefuseerd. Bij eenzelfde soort informatie op een wegvak wordt een gemiddelde bepaald, zodat dit gemiddelde alle databronnen representeert. Ook wordt een lopend gemiddelde van dezelfde data berekend, vaak gebaseerd op data van vijf minuten. Lussen geven namelijk een steeds wisselende intensiteit af. Voorbeeld: bij kruispunten worden er geen auto’s geteld bij een rood stoplicht, maar dat betekent natuurlijk niet dat er niemand staat te wachten.
Aan de randen van het netwerk worden de gefuseerde intensiteitsdata gebruikt om historische herkomst-bestemmingsmatrices naar deze data te schalen. Zo combineren we informatie over het heden met het verleden. Omdat we juist informatie willen geven over de toekomst worden de matrices volgens een trend uit historische data doorgezet om ook de vraag in de voorspellingshorizon te benaderen. De gebruikte intensiteiten in het plangebied zijn dus een combinatie van huidige metingen met historische patronen om continu tot een uur vooruit te kunnen kijken.
Ook kijken naar aanbod
Naast de verkeersvraag bekijken we ook het aanbod; hoeveel verkeer kan het netwerk aan? Behalve dat dit wisselt per type weg, wisselt het aanbod ook door het (her)openen van extra rijstroken, weersinvloeden en wegwerkzaamheden. In de stad zelf zijn groentijden van kruispunten ook beïnvloeders van het aanbod op de weg.
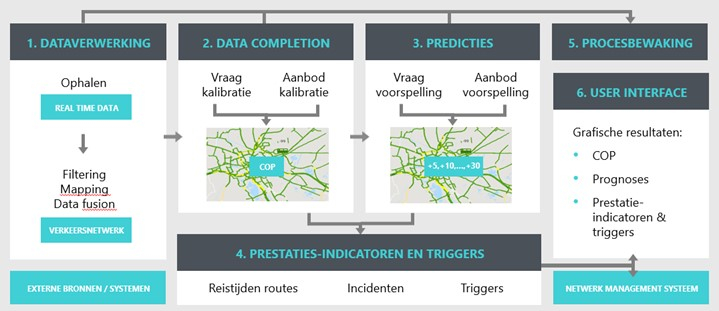
In het model dat we gebruiken voor OmniTRANS Realtime worden groentijden afgeleid uit VRI’s, gebruikt voor de bepaling van kruispuntvertragingen. Hiervoor is realtime informatie uit de V-log data én FCD van groot belang. Toch zal er niet van elk wegvak data zijn. Door middel van een verkeerstoedelingsmodel worden daarom vraag en aanbod eerst vertaald naar een compleet beeld van de huidige situatie, elke minuut weer. Zo maken we optimaal gebruik van de gemeten data en vullen we lacunes in de data modelmatig in: dit noemen we data completion.
De werking van OmniTRANS Realtime uitgelegd
Voortdurend een actuele voorspelling
Met deze complete huidige situatie, ook wel Common Operational Picture (COP) genoemd, kunnen vervolgens voorspellingen naar de toekomst gemaakt worden. Hetzelfde verkeerstoedelingsmodel vertaalt de verkeersvraag op aankomst-bestemmingsniveau. Die vloeit voort uit de COP naar intensiteit, snelheid en dichtheden op wegvakniveau per tijdsperiode. We kiezen hier voornamelijk voor een voorspelling tot 30 minuten vooruit, al werken we ook aan een 60 minuten voorspellingshorizon. Deze resultaten kunnen op hun beurt weer vertaald worden naar bijvoorbeeld reistijden of routekeuze.
OmniTRANS Realtime in de praktijk
In Deventer is ervaring opgedaan met de aansturing van een tweetal DRIP's met voorspeldata uit OmniTRANS Realtime. Dit maakt het mogelijk om de routekeuze te beïnvloeden voordat congestie ontstaat.
Op dit moment passen we OmniTRANS Realtime toe in de regio Groningen met een multimodaal voorspellend verkeersmodelsysteem. Groningen voert de komende jaren veel infrastructurele ingrepen door en om hinder te voorkomen, is het de perfecte plek om ons concept van proactief verkeersmanagement op netwerkniveau op basis van voorspeldata in de praktijk te testen.
Lees meer over het MVVS in Groningen in dit artikel van NM Magazine.





